
Fique por dentro das novidades
Inscreva-se em nossa newsletter para receber atualizações sobre novas resoluções, dicas de estudo e informações que vão fazer a diferença na sua preparação!




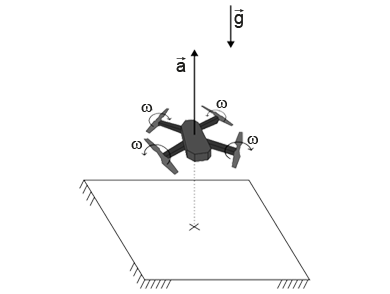
Um drone quadricóptero de massa m é controlado por seu operador, de forma a executar uma trajetória vertical com aceleração constante para cima. De repente, seus quatro motores falham ao mesmo tempo e param bruscamente. Por conta de sua velocidade vertical já adquirida, o quadricóptero ainda continua sua trajetória para cima após a falha, atingindo ao final uma altura máxima h após desde a partida do chão. Sabe-se que a força vertical F gerada por cada motor do drone é diretamente proporcional ao quadrado da velocidade angular do mesmo propulsor.
Dados:
Observação:
A velocidade angular dos propulsores imediatamente antes da falha, em rad/s, é
Pela segunda lei de Newton, sendo a aceleração do drone no primeiro trecho:
Lançamento vertical:
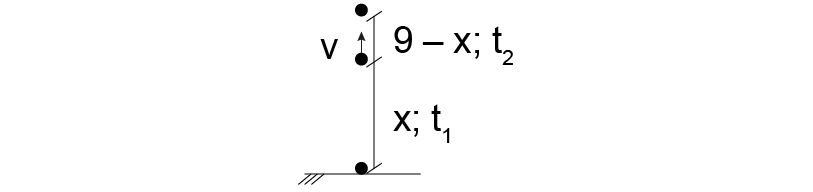
Aplicando Torricelli em ambos os trechos:
Equação horária da velocidade em ambos os trechos:
De g(III) + a(IV):
Usando (V) em (I):
Usando (VI) e (V) em (II):
Usando (**) em (*):
Inscreva-se em nossa newsletter para receber atualizações sobre novas resoluções, dicas de estudo e informações que vão fazer a diferença na sua preparação!